日志
MAX14912/MAX14913八通道数字输出驱动器调试
| |
Maxim的数字输出驱动器拥有高达200kHz的开关频率、快速且安全的电感负载消磁、负载开路/低电压/欠压检测、过流和过温保护、看门狗定时器以及SPI检错。器件能够承受高达60V电源尖峰脉冲、±1kV浪涌脉冲,以及高达12kV ESD冲击,工作在-40°C至+125°C宽温工作范围。
注:MAX14913在并行模式下不允许通过串行接口进行配置,而MAX14912即使在SRIAL为低电平时也可通过串行接口进行配置。该模式下可访问除寄存器0之外的全部寄存器(参见下文的“串行接口”部分)。

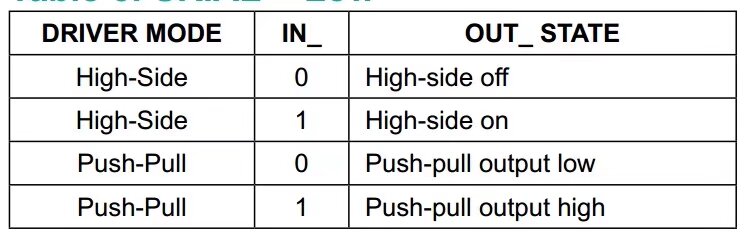
高边(HS)或推挽(PP)模式
一般来说,推挽式工作方式用于高速通信,信号波形应具有陡峭的边沿。该模式的缺点是输出总处于工作状态,为高电平或低电平,不能处于三态或具有高阻抗,除非使用Global EN引脚。
相反,高边工作方式允许工程师将输出置于高阻态,但信号波形很大程度上依赖于负载阻抗。高边模式下也可以将输出并联,支持高达9.6A的较大负载。
电源要求
MAX14912/MAX14913支持从12V至36V的较宽范围电源,所以能够用于较宽范围的应用,甚至用于电源要求较低以及容限更宽的系统。这样可保证系统设计的可靠性和灵活性。
集成5V DC-DC转换器省去了额外的电源,最大程度减少外部元件的数量,以及提高系统效率。系统中的其它器件可由该5V DC电源供电,该电源能够为外部电路提供超过100mA的电流。
系统集成
数字输出驱动器是低电压MCU/FPGA与相对高电压(12V至36V)外设器件之间的接口,外设的例子包括执行器、电机、照明灯、继电器、LED等。器件提供了对电压和电流尖峰脉冲、电感或电容负载、磁干扰和静态放电的高抗扰性。
此外,MAX14912/MAX14913提供全面的诊断能力,包括热关断、开路检测、低电源和欠压检测、过压和过流保护。4 × 4 LED驱动器矩阵可以对每通道的输出状态和故障状态进行指示。
数字接口
MAX14912和MAX14913支持两种接口:并行和串行。设计人员能够灵活使用并行或串行接口进行控制,或者同时使用两种接口。为便于理解接口,我们首先了解几个全局配置引脚。
全局配置引脚
EN – 该引脚为高电平时,器件处于正常工作模式;该引脚为低电平时,禁止任何输出操作,例如设置所有输出为高阻态。
SRIAL – 该引脚为高电平时,使能串行(SPI)操作;该引脚为低电平时,使能并行操作。
PUSHPUL – 该引脚为高电平时,使能推挽式工作模式;该引脚为低电平或浮空时,所有输出引脚处于高边工作模式。
FLTR – 该引脚为高电平时,使能所有并行逻辑输入和CS引脚上的尖峰脉冲滤波。
并行接口
并行接口是基于引脚的简单接口,用于控制驱动器输出。如果SRIAL引脚连接至地(SRIAL = 低电平),则通过并行接口控制器件。OUT_引脚的状态由对应IN_引脚和全局配置引脚控制:PUSHPL、FLTR和EN。在并行模式下控制MAX14912/MAX14913,至少需要9个GPIO引脚:控制8个输入引脚IN_和PUSHPL引脚。FLTR和EN引脚可始终保持为高电平。表1为引脚设置汇总。
表1. 并行模式引脚配置
注:MAX14913在并行模式下不允许通过串行接口进行配置,而MAX14912即使在SRIAL为低电平时也可通过串行接口进行配置。该模式下可访问除寄存器0之外的全部寄存器(参见下文的“串行接口”部分)。
通过串行接口进行配置的优先级比PUSHPL引脚设置高。逻辑电平0 (低电平)或1 (高电平)取决于VL输入,1.6V至5.5V有效。并行模式的缺点是缺少诊断信息。
串行接口
将SRIAL引脚驱动为VL电平(SRIAL = 高电平)时,使能SPI串行接口。串行模式下,所有输出引脚由内部寄存器设置和输入引脚控制。可通过串行接口引脚访问寄存器:CS、CLK、SDI和SDO。详细信息请参考MAX14912/MAX14913数据资料的串行接口部分。
循环冗余校验(CRC)、看门狗和滤波等部分特性仅受CRC/IN3、WDEN/IN5和FLTR引脚的输入逻辑控制,而负载开路检测和输出配置由OL/IN1和PUSHPL引脚的输入逻辑控制或通过寄存器设置控制。
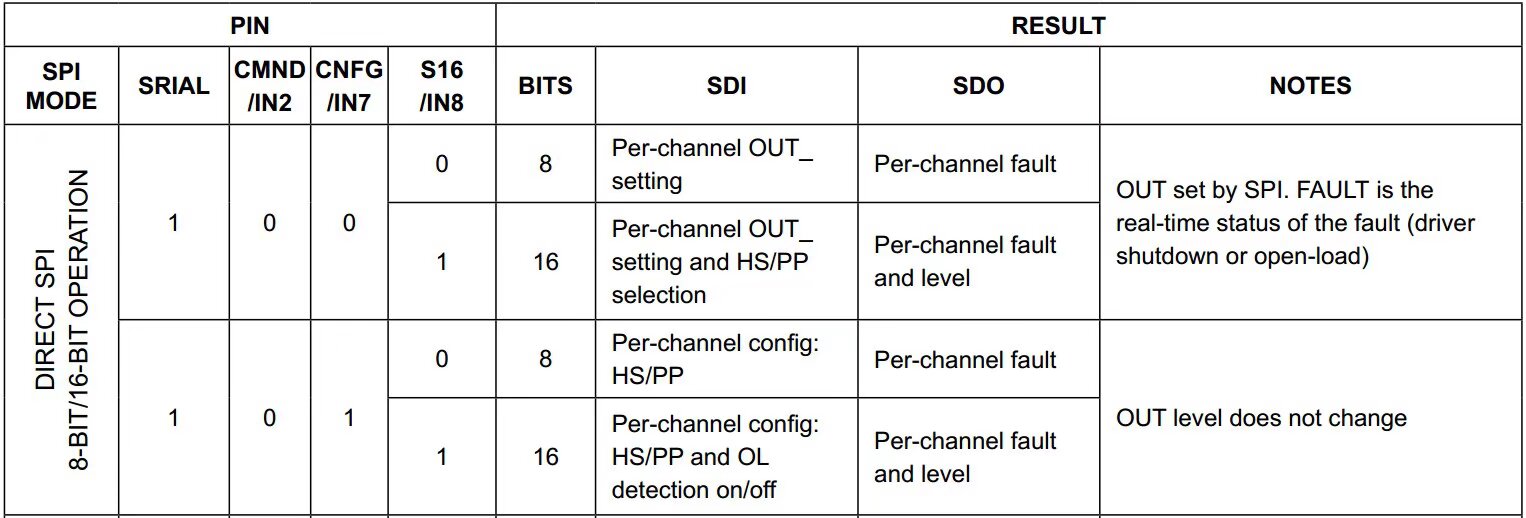
此外,CMND/IN2、CNFG/IN7和S16/IN8的设置见表2中的汇总。
表2. SPI接口模式选择
直接模式
直接SPI模式下,不需要命令字节。16位模式下,高字节控制输出电平,低字节控制输出配置。CNFG/IN7和S16/IN8设置为低电平时,只能访问寄存器0;CNFG/IN7和S16/IN8设置为高电平时,只能访问寄存器1和寄存器2。
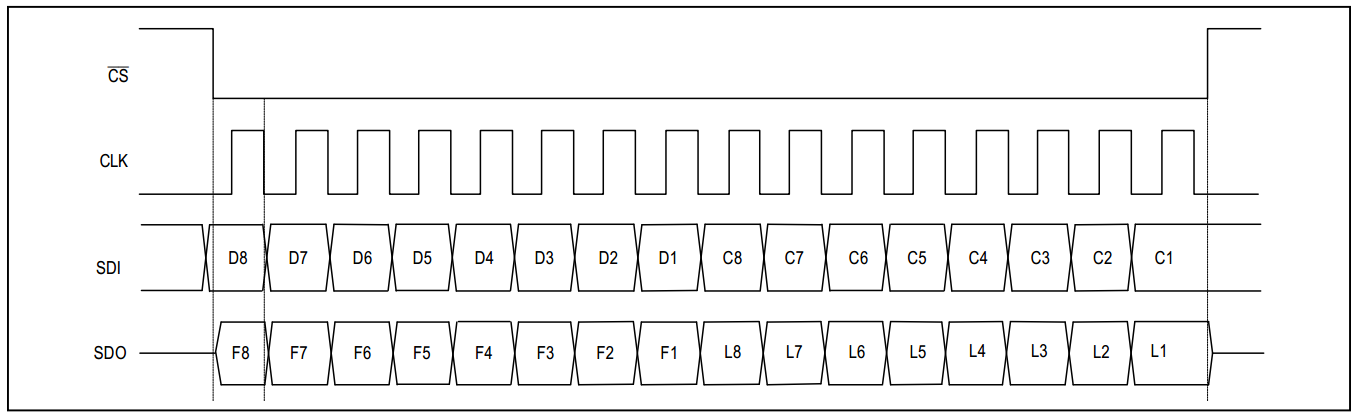
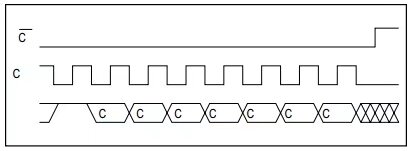
串口模式下, SPI 可以用于所有的模式设置, 使用 SPI 的模式 0(CPOL=0, CPHA=0) , 即 SDI 是在 clk 的上升沿接收数据, SDO 是在 clk 的下降沿发送数据, 空闲状态下, clk 是被拉低的, 数据的发送和接收在 CS 拉低之后有效。直接模式写操作期间,通过SDO引脚提供故障(F)和输出电平(L)诊断信息(参见图1和表3)。
图1. 16位直接SPI模式下的SPI周期
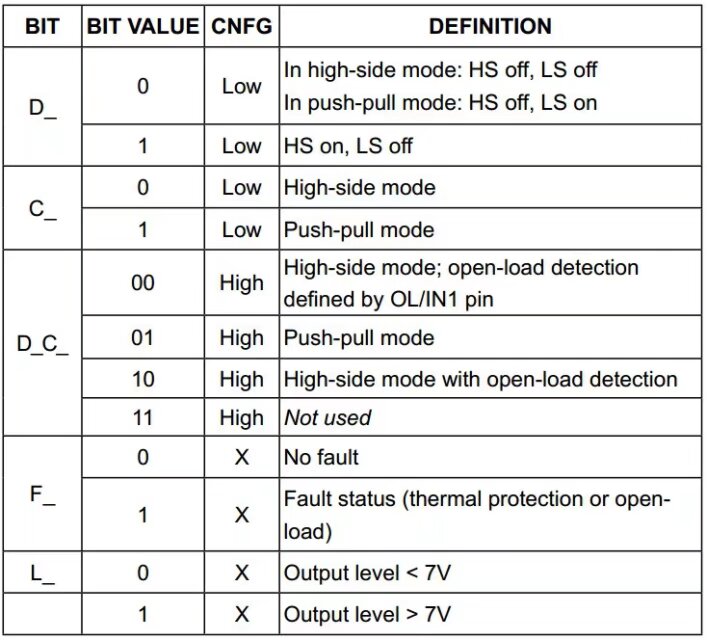
表3. 16位SPI直接模式位定义
•S16/IN8 = 低电平,且CNFG/IN7 = 低电平时,一个字节的串行数据控制OUT_状态。
•S16/IN8 = 低电平,且CNFG/IN7 = 高电平时,一个字节的串行数据控制输出模式:高边或推挽式。
•S16/IN8 = 高电平,且CNFG/IN7 = 低电平时,两个字节的串行数据控制OUT_状态和输出模式配置:高边或推挽式。
•S16/IN8 = 高电平,且CNFG/IN7 = 高电平时,第一个字节设置输出配置(高边/推挽),第二个字节使能/禁止负载开路检测功能。
建议首先设置配置寄存器,然后再更新输出电平。
注:返回的F_ (故障)和L_ (电平)信息针对之前写入的命令。为了获得实时故障和电平诊断信息,写两次。驱动器处于高边模式且使能负载开路检测时,无负载的OUT_引脚由75μA电流上拉至VDD电平。在这种情况下,确定为FAULT条件。
命令模式
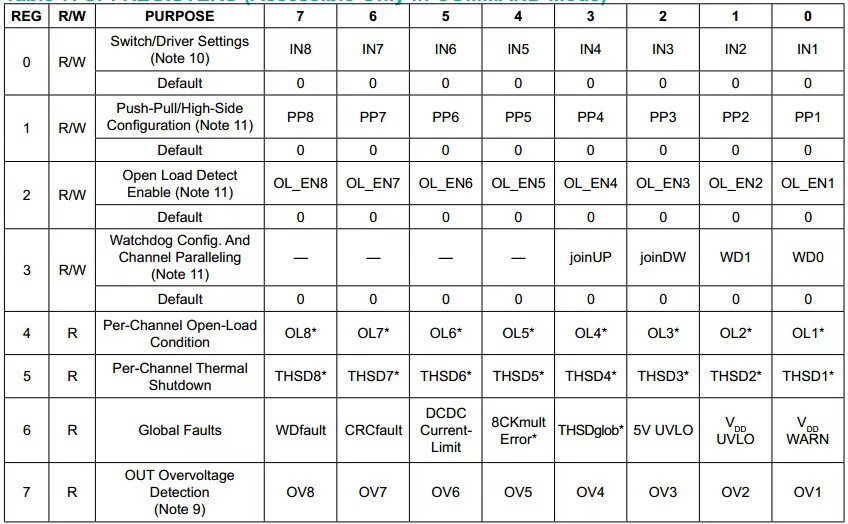
命令模式下,通过SPI接口提供所有特性和增强诊断信息。为设置为命令模式,CNMD/IN2引脚必须为高电平。S16/IN8和CNFG/IN7引脚输入被忽略。命令包含命令字节和之后的数据字节。总共有六种命令类型(寄存器映射见表4)。更多信息请参考数据资料。
注:所有故障寄存器只能由任意命令周期中设置Z = 1清除。
表4. 寄存器映射
通信错误(CRC检测)
循环冗余校验(CRC)是一种检错机制,可提高通信可靠性,以及避免意外执行错误命令。SPI协议初始没有任何检错能力,在恶劣工业环境下可能破坏串行数据。使能CRC检测时(SRIAL= 高电平,CRC/IN3 = 高电平),来自SPI主机的所有命令之后必须有一个包括7位CRC编码的附加字节,如图2所示。
图2. 微控制器应提供SDI校验字节
7位CRC编码,也称为CRC帧校验序列(FCS),根据生成多项式计算(x7 + x5 + x4 + x2 + x + 1)。MAX14900E也使用相同的多项式。更多信息以及CRC计算的C语言示例代码,请参考应用笔记6002:“MAX14900E八通道、高速工业开关的CRC编程”。
MAX14912或MAX14913安装好后,器件检查接收到的数据是否存在误码,如果未检测到错误则执行命令。如果从微控制器接收的CRC编码与计算的CRC不一致,则忽略该命令,并置位寄存器6中的第6位CRC错误位。在下一个SPI帧将CRC错误报告给主机微控制器。
多个IC的菊链配置
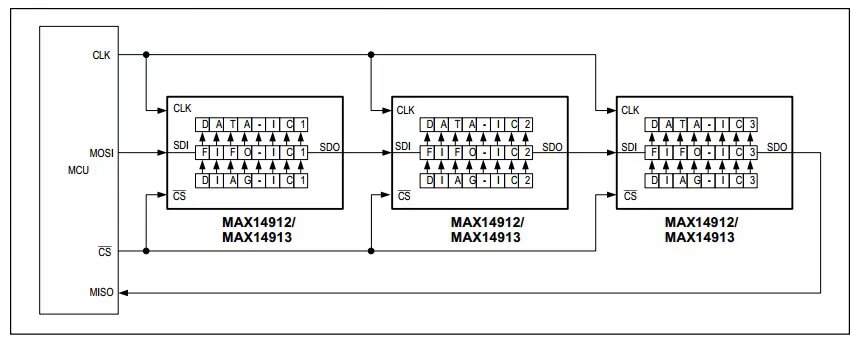
MAX14912和MAX14913支持多个器件采用菊链配置,通过单命令方法控制/监测同一SPI总线上的所有器件。所有器件使用相同的CLK和CS信号;第一片器件的SDI引脚连接到主机的MOSI引脚,最后一片器件的SDO引脚连接到主机的MISO引脚。第一片器件的数据输出(SDO)引脚连接到第二片器件的数据输入(SDI)引脚,如图3所示。其它器件通过类似的方式以菊链连接。
图3. 菊链连接
菊链连接不仅对扩展输出通道的数量没有限制,而且也支持通过组合使用数字输出驱动器和数字输入接收器,构建更加复杂的系统。例如八通道数字输入隔离器/串行器家族,MAX31910/MAX31913。
驱动电感负载
MAX14912和MAX14913具有对电感负载进行安全消磁(SafeDemag)的功能,防止高边模式下电感负载关断时引起的反冲电压损坏芯片。如果您需要驱动大电感,例如执行器、继电器或电机,当电流由芯片通过负载流向地时,电感负载中储存较大的能量。当高边开关关断造成电流终止时,能量转换为OUT_引脚上的负向尖峰脉冲。内部齐纳二极管将尖峰脉冲箝位到(VDD -56V)。例如,如果VDD = 24V,则将OUT_引脚箝位到-32V (相对于地)。在这种情况下,由于能量与|V x I|成比例,电感负载中储存的能量将快速释放。然而,能量越大,释放需要的时间越长。在此时间期间,芯片的温度可能会达到安全门限。为防止危险的热击穿,激活低边开关,使能量释放较小,直到内部温度达到安全范围。
总结
Maxim的高度集成数字输出驱动器提供大量的可靠性、灵活性和丰富功能。这些器件是为工业自动化和通信应用构建高度集成和高效控制系统的关键要素。
LYW:QQ群236949301欢迎进群讨论
LYW:QQ群236949301欢迎进群讨论

 /2
/2 


 eetop公众号
eetop公众号 创芯大讲堂
创芯大讲堂 创芯人才网
创芯人才网